Recursive Identification of Switched ARX Models
In many real time applications, the data are not entirely available and hence, need to be processed recursively. Therefore, in [1], [2], and [4] we developed a recursive method for the identification of SARX models, under the assumption that the number of models, the model orders and the mode sequence are unknown. The key to our approach is to view the identification of multiple ARX models as the identification of a single, though more complex, lifted dynamical model built by applying a polynomial embedding to the input/output data. We show that the dynamics of this lifted model do not depend on the value of the discrete state or the switching mechanism, and are linear on the so-called hybrid model parameters. Therefore, one can identify the parameters of the lifted model using a standard recursive identifier applied to the embedded input/output data. The estimated hybrid model parameters are then used to build a polynomial whose derivatives at a regressor give an estimate of the parameters of the ARX model generating that regressor. The estimated ARX model parameters are shown to converge exponentially to their true values under a suitable persistence of excitation condition on a projection of the embedded input/output data.
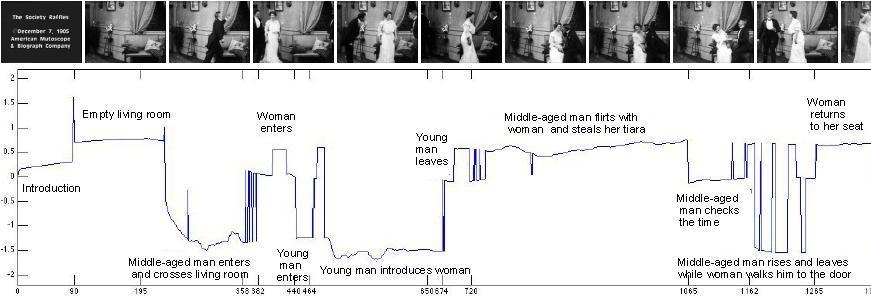
Application to Video Segmentation
In order to test the performance of our approach on real data, we apply our algorithm to temporal video segmentation in computer vision. This problem consists of separating a video sequence into multiple scenes, where each scene consisting of a group of frames with similar content. For this purpose, we model the dynamics of the video sequence within a scene with an ARX model. Thus the entire video can be described as the output of a SARX model, where each mode correspond to a different scene in the video.
 |
Publications
[2]
IEEE Conference on Decision & Control, pages 6115-6121, 2005.
[3]
Hybrid Systems: Computation and Control, pages 449-465. 2005.
[4]
IEEE Conference on Decision & Control, pages 32-37, 2004.
[5]
IEEE Conference on Decision and Control, pages 167-172, December 2003.