Our research aims at developing algorithms for infinitesimal motion estimation and segmentation from multiple central panoramic views. We have derived a rank constraint on the optical flows across many frames, which must lie in a six dimensional subspace of a higher dimensional space. We use that constraint to propose a factorization approach for recovering camera motion and scene structure. We have extended the approach to the case of multiple moving objects by showing that the motion of different objects across many frames lies in orthogonal subspaces of a higher dimensional space. Thus motion estimation and segmentation is achieved by applying GPCA to the optical flow matrix.
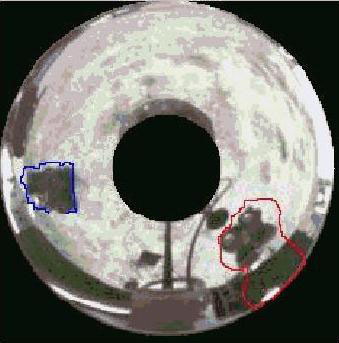
The following is a result of our algorithm to a scene of 2 moving robots captured by an omnidirectional camera. We are able to clearly identify the parts of the scene corresponding to the 2 different robots.
REFERENCES
1. O. Shakernia, R. Vidal and S. Sastry
Multibody Motion Estimation and Segmentation From Multiple Central Panoramic Views
IEEE International Conference on Robotics and Automation, Taipei, Taiwan, Sept. 2003
2. O. Shakernia, Rene Vidal, Shankar Sastry
Structure from small baseline motion with central panoramic cameras
CVPR Workshop on Omnidirectional Vision, OMNIVIS'03, June 2003
3. O. Shakernia, R. Vidal, S. Sastry
Omnidirectional vision-based egomotion estimation from backprojection flow
CVPR Workshop on Omnidirectional Vision, OMNIVIS'03, June 2003
4. O. Shakernia, R. Vidal and S. Sastry
Infinitesimal Motion Estimation from Multiple Central Panoramic Views
IEEE Workshop on Vision and Motion Computing, pp. 229-234, Orlando FL, Dec. 2002
|
|
|